
Im Entwicklungszentrum für Künstliche Intelligenz in Budapest, Ungarn, entwickeln wir die nächste Generation von Automobilsoftwarelösungen, um automatisiertes Fahren sicher zu machen. Unsere Teams entwickeln KI-Technologien für Fahrerassistenz- und automatisierte Fahrsysteme, die Computer Vision, Sensorfusion und Umweltmodellierung umfassen. Das Ziel: tödliche Verkehrsunfälle im Rahmen von Continentals Vision Zero zu eliminieren.
Continental Entwicklungszentrum für KI
in Budapest
Über uns
Unsere Tätigkeiten
In unserem KI-Entwicklungszentrum in Budapest ist es unsere Mission, modernste Deep-Learning-Technologie in unsere Produkte auf Basis von Kamera-, LiDAR- und Radarwahrnehmung zu integrieren.

Fahrerassistenz und automatisiertes Fahren
Wir begannen unsere Reise mit der Bereitstellung von Front-Vision-KI-Lösungen für die MFC-Kamerafamilie der 5. Generation und haben seitdem die Komplexität schrittweise erhöht. Derzeit werden unsere neuronalen Netze auf Front-View-MFC- und Surround-View-SVC-Kameras sowie auf LiDAR- und Radarsensoren trainiert. Die Bereitstellung dieser Lösungen erfordert den Einsatz modernster Deep-Learning-Algorithmen mit sich ständig weiterentwickelnden neuronalen Architekturen. Durch unsere Partnerschaft mit Aurora erweitern wir unser Leistungsspektrum von fortschrittlichen Fahrerassistenzsystemen bis hin zu hochautonomem und vollautomatisiertem Fahren.

Lösungen für automatisiertes Parken
In unseren automatisierten Parklösungen nutzen wir Kameravisionen, KI-gestützte Wahrnehmung und Szenenverständnis. Wir entwickeln intelligente Algorithmen, um Parkobjekte und -szenarien nahtlos zu erkennen. Mit einem "Safety First"-Ansatz stellen unsere Kollisionsvermeidungssysteme bei niedriger Geschwindigkeit höchste Sicherheit für alle sicher. Unsere robuste Datenverwaltungsinfrastruktur, einschließlich Datenbeschriftung, Engineering, Anreicherung und multimodaler LLM-basierter Beschreibungsgenerierung, liefert hochwertige Daten für das Modelltraining.
Synthetische Datengenerierung
Wir sind aktiv in der Forschung und Erprobung im Bereich Datenwissenschaft beteiligt und erforschen neuartige Techniken für die Erzeugung von synthetischen Daten. Dieser Ansatz erweitert nicht nur die verfügbaren Daten, sondern ermöglicht auch die Erstellung verschiedener und realistischer Szenarien, die die Robustheit und Anpassungsfähigkeit unserer KI-Lösungen weiter verbessern.
Hoch skalierbare Hardware
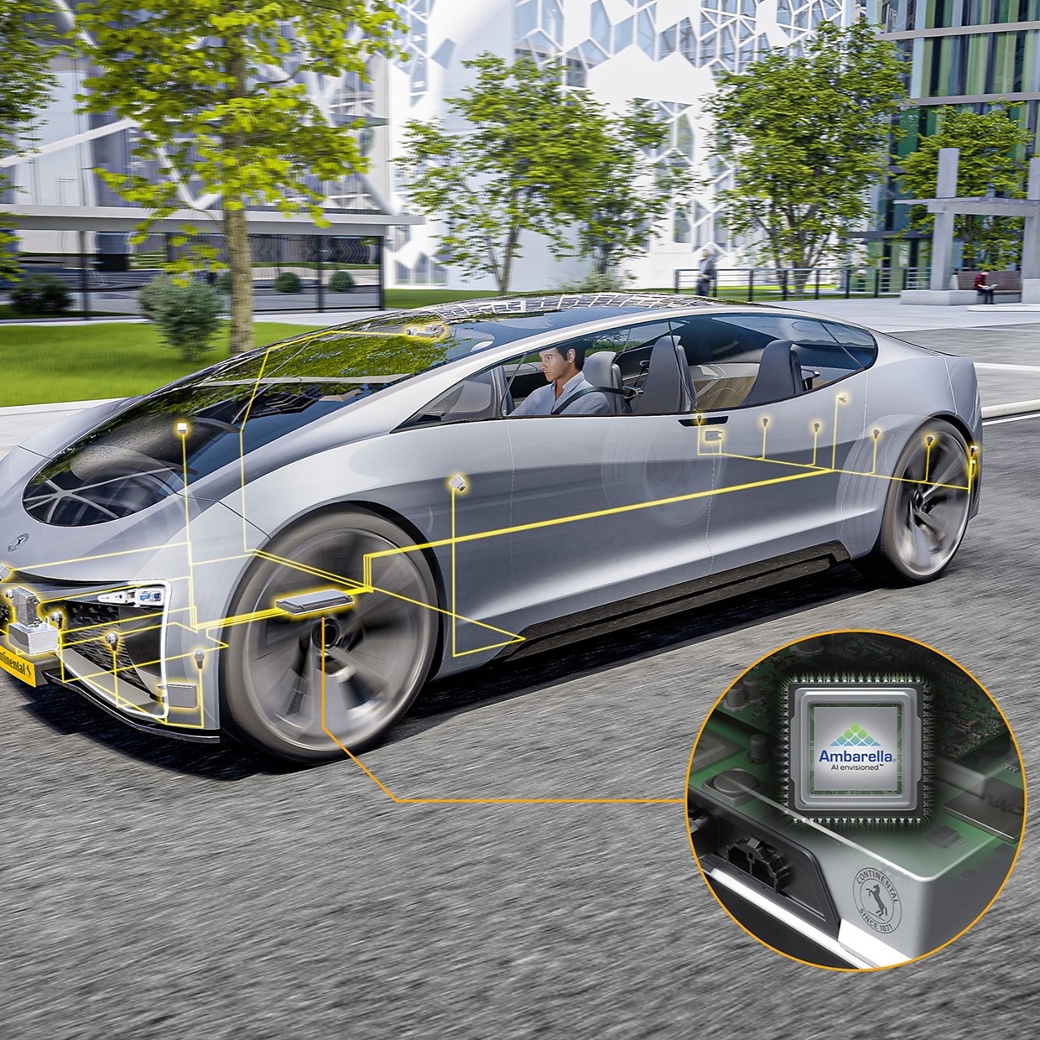
Um die wachsende algorithmische Komplexität zu meistern, haben wir uns mit Ambarella zusammengetan, um hoch skalierbare Hardware für die Implementierung unserer Lösungen zu erreichen. Gemeinsam entwickeln wir Wahrnehmungslösungen für fortschrittliche Fahrerassistenzsysteme und hochautomatisiertes Fahren, um eine bis zu fünfmal höhere Energieeffizienz zu erreichen.

- Utasi, Á. (2022): “PEA: Improving the Performance of ReLU Networks for Free by Using Progressive Ensemble Activations”, im Workshop "Efficient Deep Learning für Computer Vision (ECV) CVPR"
- P. Almasi, R. Moni, and B. Gyires-Toth. Robust reinforcement learning based autonomous driving agent for simulation and real world. In 2020 International Joint Conference on Neural Networks (IJCNN), Seiten 1-8, 2020.
Unsere KI-Experten

Ákos Utasi
Senior Deep Learning Engineer

Róbert Moni
Senior Deep Learning Engineer
- Ákos Utasi hat einen Doktortitel in Informatik und einen akademischen Hintergrund in den Bereichen Machine Learning und Computer Vision. Seine berufliche Karriere begann er mit der Arbeit an der Modellierung menschlicher Gesichter und Emotionen sowie an der Kamerawahrnehmung für autonomes Fahren. Er startete im Jahr 2020 bei Continental und arbeitet hauptsächlich an der Erkennung von Fahrspurmarkierungen, der Objekterkennung und der Posenschätzung.
- Er ist auch Gutachter für den Machine Learning for Autonomous Driving Workshop (ML4AD) bei der Konferenz über neuronale Informationsverarbeitungssysteme (NeurIPS) und für die Konferenz der ungarischen Vereinigung für Bildverarbeitung und Mustererkennung (KÉPAF).
- Seit 2018 bei Continental trägt Róbert Moni zur Umgebungsmessung der nächsten Generation bei, indem er Expertise in den Bereichen Low-Level Fusion, 3D-Objekterkennung, Modell-KPI-Definition, Logging und Visualisierung einbringt. Sein Ziel ist es, eine robuste und skalierbare AI-Lösung mit Sensor Fusion bereitzustellen.
- Derzeit studiert er Deep Reinforcement Learning in komplexen Umgebungen für Anwendungsfälle wie vollständig autonomes Fahren an der Doktorandenschule für Elektrotechnik an der Budapest University of Technology and Economics (BME).

0:45
Möchten Sie mehr erfahren?
*Sollten das Kontaktformular nicht laden, überprüfen Sie bitte die erweiterten Cookie-Einstellungen, und aktivieren Sie die Funktions-Cookies zum Zwecke des Kontaktmanagements.